基于虚拟仪器的直线电机测试系统及其应用
虚拟仪器是计算机与测试技术的结合。在测试系统中采用虚拟仪器可提高系统的整体水平。通过使用传感器、数据采集卡和工业计算机 组成的虚拟仪器测试系统对电机进行测试, 提高了电机试验可重复性和测试速度。测试时, 试验 数据经过传感器、变送器和数据采集卡传送到计算机中,由编制的试验软件进行数据处理、数据显示、数据管理、数据发送、实时检测和打印等功能, 从而快速地得到电机的性能参数。测试结果能够及时地反馈给电机设计人员, 使设计人员能够快速而准确对电机做出评价。
直线电机试验是研究直线电机的一个重要的方法。通过试验不仅可以检验产品是否符合设计要求, 还可以发现问题, 促使我们进一步研究和掌握其内在规律 , 提高理论研究和工程技术水平。
1、测试系统硬件组成
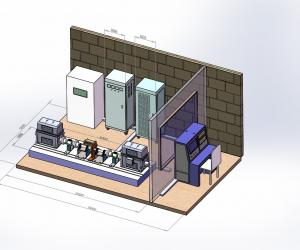
整个测试系统组成为:直线电机及负载、上位机、测试台、测量元件、数据采集系统、各接口电 路、控制电路等。系统可完成试验内容包括起动 试验、额定试验、堵动试验等, 其测试参数具体有电感、反电动势、推力、电流、电机温升等。
上位机将采集的数据实时存取、分析处理 ,实 现显示、打印等功能, 并控制测试流程及相应的外围设备。各种测试元件用来测试各个参量 (包括 电量及非电量 ), 并将测试的结果经过变送器后 传输给数据采集卡以供采集。
图 1为连续堵动推力波动系数试验示意图。 此试验使用了几乎所有项目中使用的传感器(除反电动势电压采样电路 ), 并包括了位置闭环控 制 ,具有典型性。从图 1中可知上位机控制被测、 陪测电机的运行模式, 2 台电机通过丝杠螺母联 结 ,运行时产生力。被测电机的电流、推力信号以 及温度信号经传感器和变送器后 , 通过信号转接 板传输到 A /D卡。此 A /D 卡具有 16个通道, 分 辨率为 16 位。 位置脉冲由计数卡记录。 Lab-V IEW 驱动采集卡,并对采集的数据进行处理 。
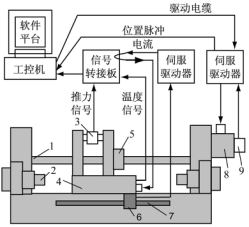
图1 连续堵动推力波动系数试验示意图
1—滚珠丝杠;2—防撞装置;3—推力传感器;4—动子;5— 丝杠螺母;6—直线光栅读数头 ;7—光栅尺;8—旋转电机;9—光电编码器
2 测试项目
按照直线电机性能测试的试验内容, 主要分成四个模块 :主界面、起动试验、额定试验、堵动试验 ,并由主界面调用各个测试项目。
每个试验模块又由具体的试验项目组成。测 试项目分类如下。
(1)起动试验 :(a) 绕组直流电阻 ;(b)绕 组电感、电气时间常数 ;(c)静摩擦力测量。
(2)额定试验 :(a)反电动势;(b) 额定电 流、额定推力及冷却水流量;(c)额定负载温升 及冷却水流量。
(3)堵动试验:(a)连续堵动推力波动系数; (b)峰值推力 。
常规的试验顺序为:(1)起动试验 (a)、(b)、 (c);(2)额定试验 (a)、(b)、(c);(3) 堵动试验(a)、(b)。试验人员可以按 照常规试验顺序进 行 ,也可以在主界面中单独选择一个或多个测试项目进行测试。在每个具体测试项的界面中设有 下一项的提示。提示内容为按照常规试验顺序而 进行的下一项,以方便测试者在项目间跳转。
在每一具体测试项目中 , 按照功能不同又可以分成以下小模块。
● 采集卡初始化模块:按照试验对控制量的不同对采集卡进行不同的设置。
● 数据采集模块 :根据设定的参数, 如测试项
目列表、参数通道号等 ,完成对被测电机各参数的采样。
● 数据分析处理模块:针对不同的测试项目 编写相应的处理函数 ,通过采样得到数值 ;结合设定的测量系数计算后得到所需参数 ,通过不同的 函数拟合方法生成曲线。
● 保存模块:把测试后得到的试验参数及曲
线存储于文件。
3 、试验示例
各个试验的基本结构是一样的, 按照直线电 机的运行状态可分为动态和静态。下面分别选取 连续堵动推力波动系数和反电动势试验详细说明 测试系统的功能及应用。
1、 连续堵动波动系数试验
此试验目的是获得被测直线电机不同位置时 的输出推力。测试时 ,将直线电机一个极对距分 割成若干等距点。旋转电机由 MATLAB 闭位置 环经丝杠带动直线电机在直线电机一个极对距内 每个分割点定位并锁定。在其位置锁定期间工作在电流模式的直线电机受 LabV IEW 控制发出一 次推力脉冲 ,同时 LabV IEW 驱动的数据采集卡采样位置和推力信号,并监控直线电机电流、温度等 动态。最后得到的是一条在某确定电流指令时直 线电机位置 -推力曲线,并计算其推力波动系数。根据以上试验过程设计的测试流程图如图2。

图 2 连续堵动推力波动系数试验流程图
图 3为直线电机通入 20 A的推力 -位置图。经计算得出直线电机输出推力的推力波动系 数为
Kfb= 
推力波动系数反映了电机和伺服驱动器之间的匹 配性能和直线电机推力的平稳性。经测试 ,电机在有水冷、温升 100 K时 ,额定电流下输出推力的最大值 Fm ax为 3 134 N, 最小值Fmin为 2 906 N,平均值 Fm ean为 3 020 N,则:
Kfb= 
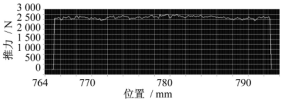
图 3 连续堵动推力波动系数试验推力-位置图
2、反电动势试验
反电动势波形与电机的磁路设计有关。波形与理想波形的偏差会影响电磁力产生波动, 这会 严重影响速度和位置控制的性能。
此试验通过设定陪测旋转电机的转速,经由丝杠带动直线电机在不同速度下运行。线反电势 信号直接通过信号转接板将信号送入测试工控机 ;数据采集卡数据采样,描绘其波形,并利用软件的模块 H arm onic D istortion Ana lyzer. v i实现对反电动势波形的谐波分析;同时计数器采集直线 电机的速度并显示。
直线电机速度为43. 3时的三相反电动势波 形及其幅值频谱分析如图4。由图可见,其反电 动势波形正弦性良好,符合设计要求。
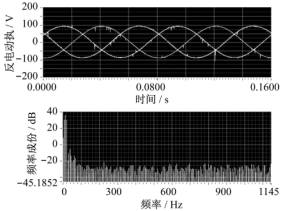
图 4 反电动势采样图
虚拟仪器的应用缩短了系统的开发周期, 减少了开关、按钮 ,使测试方便。经过反复试验, 伺服驱动器、电机、信号转接板、传感器等硬件部分 均可以准确地产生和传输信号。同时 ,软件可以根据采集的数据画出曲线或进行其他一些数据处理 ,能有效地完成多项试验。此测试系统功能可靠、可信度高,大大提高了测试效率。